










Three-phase star/delta motor starter connection
Yannis Alifragis automation, Industrial automations,


Materials:
1: one power relay with one auxiliary contact : no
2: one power relay with one auxiliary contact : nc
3: one power relay with three auxiliary contacts: two : nc and one no
4: one thermal with one auxiliary contact : nc
5: one timer
6: two Buttons with reset one :nc and the other no
7: an induction motor 380/660
NOTE :
The Control circuit depending on the operating conditions can be powered by two phases – from phase and neutral and voltage from a transformer .
The control circuit is supplied by a transformer with a voltage of 42 to 110 volts maximum when the conductors where it is formed have an area over tanks with flammable materials and when part of it comes into contact with humans.
Plan:

EXPLANATION:
Pressing the Start Button (start) coil KM1 will be supplied with voltage as a result of which its contacts will close, the closing of KM1 contacts 13-14 has the effect of replacing the Start Button in the circuit, this contact is called the self-holding contact at the same time with KM1, the timing coil will also come into operation, so the voltage passes from contacts 7 and 5 of the timing to NC 21-22 of KM3, as a result of which it will arm the coil of KM2 by arming KM2, the motor now works in a star connection with limited starting voltage while its auxiliary contact 11-12 from NC became NO
the timer will remain on contacts 7 and 5 for as long as we have set it, this time is necessary for the motor to develop a certain number of revolutions and for the starting voltage to decrease due to the progressive anti-electromotive force. then the timer makes the switch from contact 5 to contact 6 then KM2 disarms and its contacts from NO will become NC again resulting in the arming of KM3. After the KM3 is armed, its auxiliary contacts change state, so contact 11-12 from NC becomes N
By cutting off the phase T towards the timer, 21 – 22 from NC become NO as a result of the de-excitation of the coil of the timer and contact 13 - 14 from NO become NC thus holding KM3 through the NC contact 11 -12 of KM2 with it the way our motor now works in a delta connection.
As for the contacts 95-96 of the thermal and 11-12 of the Button (stop) they are connected in series so that when the thermal needs to be interrupted or for any other reason we need to interrupt it ourselves from the Stop Button.
In the drawing it can be seen that you connect the thermal to the output of KM1, this results in the current passing through the motor coils passing through the thermal in normal operation. the current in the motor coil is smaller than the line current, so a current that reaches 58% of the actual operating intensity passes through the thermal, for this in the star-delta switches the thermal is set to 58%.
More detailed
STAR-DELTA AUTOMATIC SWITCHThe motor starts in star and then just before reaching its rated speed it turns into delta.
Inside three-phase motors there are 3 compound coils (windings) which are U1-U2, V1-V2, W1-W2 or VX, VY, WZ


Short-circuited rotor asynchronous motors are simple to manufacture and have low maintenance costs. For this reason their use is widespread.
Their starting current is 4 to 8 times the normal operating current. For this reason, the direct starting of the motor in delta connection, which is their operation connection, creates problems in the network (voltage drop).
To limit the starting current, but also to protect them, the star-delta (Y-D) automatic switch is used, referred to as star-delta for brevity.
It is usually used in engines with a power of more than three horsepower (about 2 kW).

{kind=link}
When starting the motor the three windings must be connected in a star connection. For this purpose, the ends U2, V2 and W2 are connected together, while the ends U1, V1 and W1 are connected to the phases L1, L2 and L3 respectively.
After the motor has run for a period of time to reach approximately its rated rotational speed, the circuit breaker changes the motor connection from star to delta. This is done by bridging the ends U1-W2, V1-U2 and W1-V2 and connecting them to the phases L1, L2, L3 respectively.
The starting current of a motor in a star connection is 3 times smaller than the starting current in a delta connection.

Comparison of the two star and delta connections
Suppose I connect two identical motors to the same network (next figure). Left in a star and right in a triangle

In the delta connection we notice that while we apply a 400V polar voltage to the motor, its coils are also supplied with 400V.
1. If the motor coils are made for 230V, in star connection the motor will work normally but in delta connection they will be destroyed immediately due to higher voltage.
2. If the motor coils are designed for 400V, in delta connection the motor will run normally, but in star connection the following will happen:
a) The coils will receive a lower voltage than their normal
b) The motor power will be smaller
c) It will not be able to meet its load
d) It will run at lower speed and the current in the coils will be higher than the rated
The result will be that the motor windings will burn out after some time.
With no load on its shaft the motor will run normally without any problem
In star connection the motor current is three times less than in delta connection as shown below:


CONNECTION AND EXPLANATION
In the figure below, the K1M relay is called a mains relay and connects phases L1, L2 and L3 to terminals U1, V1 and W1 of the motor respectively.
The K2M relay is called a delta relay because, when activated, it connects the windings in a delta connection (bridges the ends U1-W2, V1-U2 and W1-V2 in pairs).
Finally, the K3M relay is called a star relay because when it is activated, it bridges the ends of the U2, V2 and W2 windings, connecting them in a star connection.
Relays K2M and K3M must never be activated at the same time, because then a short circuit of the three phases is caused in positions 1,3,5 of relay K3M.

To start the engine, switch Q1 must first be manually closed and then the START button must be pressed. Then electric current passes through the coils of relay K3M and timer K1T, activating them.
Let us now consider what happens with the activation of the K3M relay.
· the normally open power contacts 1-2, 3-4, 5-6 of K3M
close · the normally open contact of 13-14 closes
· the normally closed contact of 21-22 opens
Closing contacts 1-2, 3-4 and 5-6 of K3M connects the windings of the motor in a star connection. The closing of contact 13-14 results in the activation of relay K1M, which through its power contacts 1-2, 3-4 and 5-6 connects, through the thermal, the three phases L1, L2, L3 of the network with the terminals U1, V1, W1 of the motor windings. So the motor starts in star connection. The opening of contact 21-22 of K3M excludes the activation of the K2M relay in parallel with K3M, which would result in the short-circuiting of the three phases.
With the activation of the K1M relay:
· the normally open contact of 13-14 closes, supplying current to the automation control circuit and after releasing the START button. This is the restraint contact
· the engine operation indicator lamp H1 lights up.
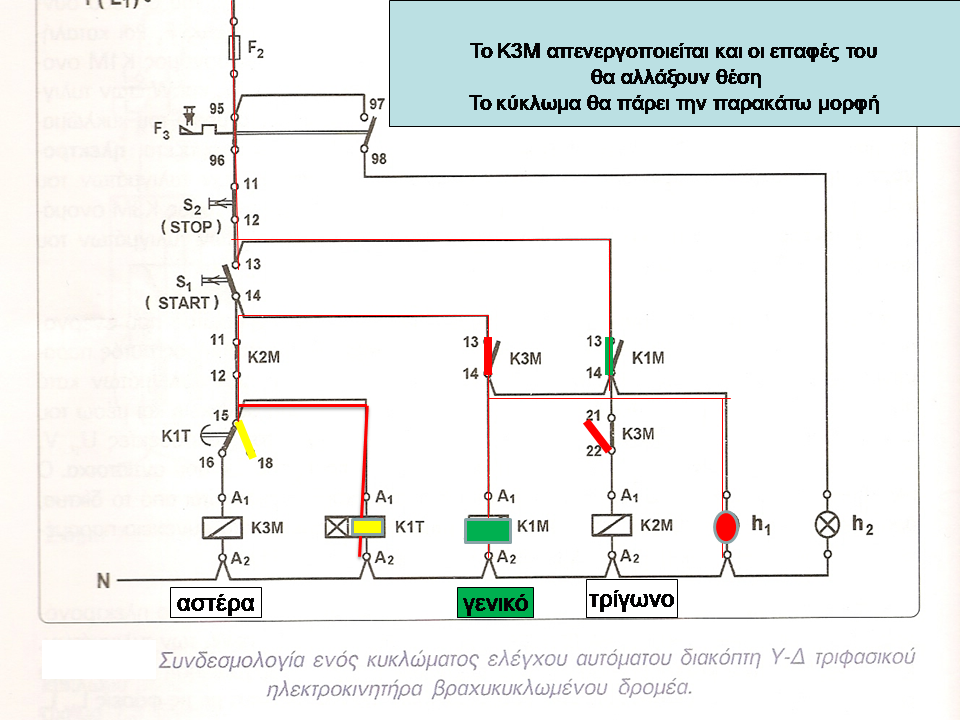
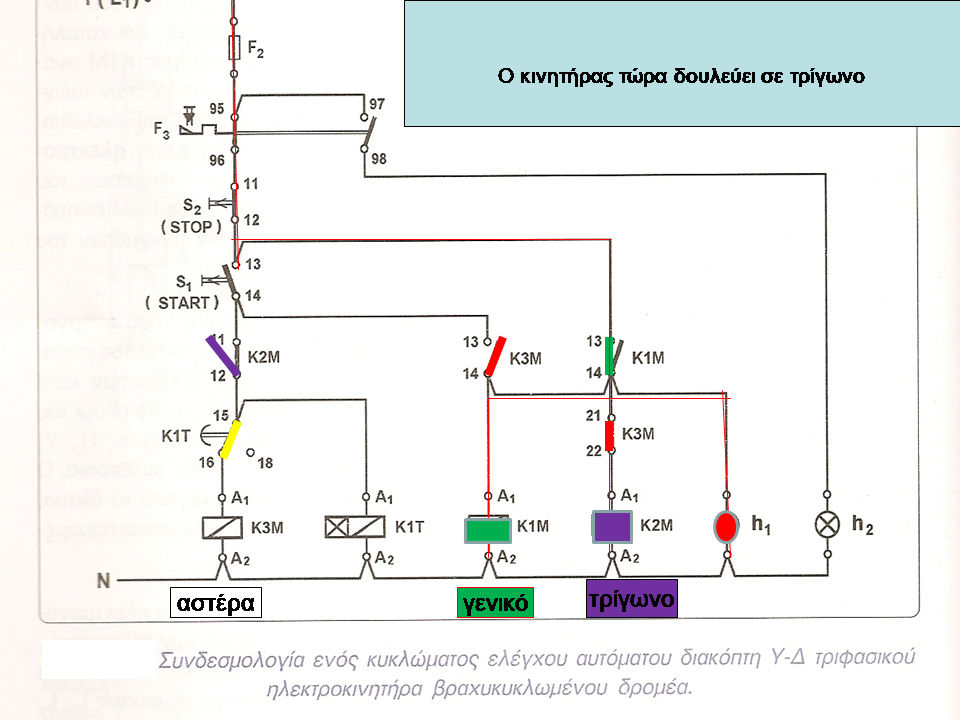
As mentioned pressing START also activated the K1T timer. When the time for which it is set has passed, the contact of 15-16 opens. Then the star relay K3M is deactivated, as a result of which the contact of 21-22 closes, activating the delta relay K2M, which joins the windings of the motor in a delta connection.
The activation of K2M opens contact 11-12, thus excluding the simultaneous activation of star relay K3M.
Finally, pressing the STOP button cuts off power to the entire control circuit, deactivating all relays and stopping the engine. Then the indicator light H1 also goes out.
The mission of thermals is to protect the motor from continuous overload, which can damage its windings. So if the motor overload time, exceeds the time period in which the thermal F3 is set, then it is activated: Contact 95-96 opens, while 97-98 closes. Opening contact 95-96 has the consequence of interrupting the power supply to the relay coils and stopping the motor. The operating indicator light H1 goes out, while the fault light H2 lights up. At this point we mention that the thermal current is set to 0.58.Ion (i.e. in the delta phase current), where Ion is the motor's nominal operating current.
After eliminating the cause that caused the overload of the motor, in order to be able to start the motor again, we press the reset button of the thermal.


 Let's see the operation of the circuit step by step again
Let's see the operation of the circuit step by step again






 In small motors instead of load switch, fuses and thermal I can use a magneto thermal as in the circuit below
In small motors instead of load switch, fuses and thermal I can use a magneto thermal as in the circuit below

 Let's also look at an alternative automation circuit with a timer of 2 auxiliary contacts (17-18 immediate activation and 27-28 time delay)
Let's also look at an alternative automation circuit with a timer of 2 auxiliary contacts (17-18 immediate activation and 27-28 time delay)


Relay selection according to engine power


Which motors can be connected with a Y/D star-delta switch
To connect a three-phase motor to the network, the pole voltage of the network must coincide with one of the operating voltages of the motor, which are indicated on its nameplate. The mains connection possibilities are given in the table below (the voltage that cannot be used is written in fine print)


Starting current
When starting three-phase motors, large starting currents occur. These currents cause a momentary dip in the voltage in the networks that supply the motors and which cause abnormalities in the proper operation of devices that need constant operating voltage.
These voltage drops depend not only on the starting current Iek, but also on the capacity of the power grid.
For three-phase motors in practice, the following values apply with a fairly good approximation:
Single-phase motor (direct start) Iek=6Ion
Three-phase motor (direct start) Iek=6Ion
Three-phase motor (start with Y/D) Iek=2Ion
Ring bearing engine Iec=1.25Ion
In general, in the A.T.K.v.d. their starting current or peak current (Iec) is a multiple of their nominal current (IN) depending on the motor's characterization in terms of the number of its poles and we consider that it follows the elements of the following table:
 The exact calculation of the starting current or peak current (IA) of A.T.K.b.d., results from their starting factor (k) - which is given in their technical characteristics by their manufacturing company - times the nominal their current (IN), that is: Iek = k . IN
The exact calculation of the starting current or peak current (IA) of A.T.K.b.d., results from their starting factor (k) - which is given in their technical characteristics by their manufacturing company - times the nominal their current (IN), that is: Iek = k . IN
The limits of the maximum starting current demand defined by PPC in relation to the number of motor starts are related to the type of low voltage network (LV) that electrifies the installation, that is, if it is overhead or underground.
These limits are given in the table below:

In the event that the consumer has his own substation, then the limit of the permitted starting current defined by PPC depends on the apparent power (KVA) of the private substation.
These limits are given in the table below:

If none of the above is observed, we will have to limit the starting current by one of the ways being the automatic Y/D switch
If it is done sooner, the fuses may be blown (because the motor has not reached its normal speed and the current will suddenly increase to a large value during the premature switching to delta) and after a few starts the delta relay contacts are destroyed.
If it is done late, we have a reduction in engine power and torque, which can also cause problems.
The switching time can be estimated empirically from the motor noise as it accelerates.
But it can be calculated more accurately by measuring the motor current.
The switching should be done when the starting current, as it decreases, falls to twice the rated current of the motor. This current can be measured with an ammeter and thus the switching time found.




When switching from star to delta it arms the delta relay and disarms the star relay at the same time. This puts stress on the motor and the relays because it creates a momentary short circuit and sparking when switching from star to delta In large motors I prefer to disarm the star relay first and then arm the delta relay after a few msec.


Adjustable activation delay from 1-20 sec.
40-60 msec delay in triangle activation.
LED for operation indicator in a triangle.
It works continuously under voltage.
See 30 KW (40.7HP) motor starter with star-delta switch. The change from star to delta takes place in about 40 seconds as you can understand from the change in the motor noise in the following video
THERMAL SETTING
The thermal is set to 0.58 of the motor's rated current
But let's see below why
Let's say the rated current of a 3Φ 400Δ motor is 10A.
If the motor started directly in D it would draw 6*10=60A
When the motor starts in star Y the thermal will flow from 60/3=20A (IY=IΔ/3) for a few seconds until it reaches the rated speed.
When the motor turns in triangle D the thermal will flow from 10/2=5 A.
That's why I set the thermal to 0.58*10=5.8A
PROBLEM
We have a 10KW motor and cof=0.8
To find:
1 .The regulation of the thermal motor if it starts directly
2.The starting current of the motor if it starts directly
3.The regulation of the thermal motor if it starts with a Y/D switch
4.The current flowing through the thermal motor at the time of starting in star Y, if started with a Y/D switch
5. The current that flows through the thermal motor during the operation of the motor in delta D, if it starts with a Y/D switch
SOLUTION
The current of the motor will be
I=P/(1.73*V*conf)=10000 /(1.73*400*0.8)=18 A
Direct start
1. thermal setting at 18 A
2. motor starting current Iec=6*I=6*18=108 A
Start with Y/D switch
3. setting thermal at 0.58*I=0.58*18=10.44 A
4. The current flowing through the thermal motor at the moment of starting in star Y is Iek(Y)=Iek/3=108/3= 36 A
5. The current flowing through the motor thermal during the operation of the motor in triangle D is 0.5*I=0.5*18=9 A (I set the thermal to 10.44 A)
Manual star-delta switch
In addition to the automatic star-delta switch, in the past they also used the manual switch where the switching from star to delta is done manually, but straining the motor because the switching time is at the will of the operator


three phase dol starter Control overload Indicator Power Wiring diagram
Books
https://elearning.teicm.gr/file.php/318/trifasikos_asynxronos_kinitiras.pdf
http://www.hlektrologia.weebly.com/uploads/6/7/1/5/6715419/p209_284.pdf
http:/ /ebooks.edu.gr/modules/ebook/show.php/DSGL-C123/487/3182,12850/
http://okeanis.lib.puas.gr/xmlui/bitstream/handle/ele13033.pdf
http:// www.mie.uth.gr/ekp_yliko/kinitires.pdf
http://www.hlektrologia.weebly.com/uploads/6/7/1/5/6715419/p209_284.pdf
http://www.mie.uth. gr/ekp_yliko/hlmhx_en6.pdf
Connections
https://www.matsakis.gr/syndesi_kinitirwn_astera_or_trigono_diafaneies.pdf
http://users.teilar.gr/~trogadas/MIXANES/ERGASTHRIO%20MIXANES%20AC/ergastirioAC.pdf
https://eclass.teiemt.gr/modules209. pdf
https://maredu.gunet.gr/modules/document/pdf
΄ http://edume.myds.me/00_0070_e_library/10030/06_Electrical_installations_books/12/B15.pdf
https://maredu.gunet.gr/modules/ document/pdf
Works
http://artemis.cslab.ece.ntua.gr:8080/jspui/bitstream/123456789/13594/1/DT2017-0252.pdf
http://repository.library.teimes.gr/xmlui/bitstream/pdf
http ://eclass.sch.gr/modules/document/file.php/T522110/askisi_3_automati_ekkinisi_trif_kin_vrax_dromea.pdf
http://nefeli.lib.teicrete.gr/browse/sefe/VardakisMichalis2014.pdf
http://users.sch.gr //iliaslamprou/images/stories/askiseis_electrikwn_egkatastasewn/syndesi_kinitirwn_astera_or_trigono/project_seet_automatos_diakoptis_astera_trigwnou.pdf
http://repository.library.teimes.gr/xmlui/bitstream/
Other
https://hlektrologia.weebly.com/uploads/6/7/1/ 5/6715419/p285_320.pdf
http://users.sch.gr/iliaslamprou/images/stories/askiseis_electrikwn_egkatastasewn/thema_6_monofasikoi_kinitires.pdf
https://elearning.teicm.gr/file.php/410/Single_phase_IM_SD_2017.pdf
http://okeanis.lib.puas. gr/xmlui/bitstream/handle/123456789
http://okeanis.lib.teipir.gr/xmlui/bitstream/handle/123456789/2863/ele_40956.pdf
In the figure below, the K1M relay is called a mains relay and connects phases L1, L2 and L3 to terminals U1, V1 and W1 of the motor respectively.
The K2M relay is called a delta relay because, when activated, it connects the windings in a delta connection (bridges the ends U1-W2, V1-U2 and W1-V2 in pairs).
Finally, the K3M relay is called a star relay because when it is activated, it bridges the ends of the U2, V2 and W2 windings, connecting them in a star connection.
Relays K2M and K3M must never be activated at the same time, because then a short circuit of the three phases is caused in positions 1,3,5 of relay K3M.
To start the engine, switch Q1 must first be manually closed and then the START button must be pressed. Then electric current passes through the coils of relay K3M and timer K1T, activating them.
Let us now consider what happens with the activation of the K3M relay.
· the normally open power contacts 1-2, 3-4, 5-6 of K3M
close · the normally open contact of 13-14 closes
· the normally closed contact of 21-22 opens
Closing contacts 1-2, 3-4 and 5-6 of K3M connects the windings of the motor in a star connection. The closing of contact 13-14 results in the activation of relay K1M, which through its power contacts 1-2, 3-4 and 5-6 connects, through the thermal, the three phases L1, L2, L3 of the network with the terminals U1, V1, W1 of the motor windings. So the motor starts in star connection. The opening of contact 21-22 of K3M excludes the activation of the K2M relay in parallel with K3M, which would result in the short-circuiting of the three phases.
With the activation of the K1M relay:
· the normally open contact of 13-14 closes, supplying current to the automation control circuit and after releasing the START button. This is the restraint contact
· the engine operation indicator lamp H1 lights up.
As mentioned pressing START also activated the K1T timer. When the time for which it is set has passed, the contact of 15-16 opens. Then the star relay K3M is deactivated, as a result of which the contact of 21-22 closes, activating the delta relay K2M, which joins the windings of the motor in a delta connection.
The activation of K2M opens contact 11-12, thus excluding the simultaneous activation of star relay K3M.
Finally, pressing the STOP button cuts off power to the entire control circuit, deactivating all relays and stopping the engine. Then the indicator light H1 also goes out.
The mission of thermals is to protect the motor from continuous overload, which can damage its windings. So if the motor overload time, exceeds the time period in which the thermal F3 is set, then it is activated: Contact 95-96 opens, while 97-98 closes. Opening contact 95-96 has the consequence of interrupting the power supply to the relay coils and stopping the motor. The operating indicator light H1 goes out, while the fault light H2 lights up. At this point we mention that the thermal current is set to 0.58.Ion (i.e. in the delta phase current), where Ion is the motor's nominal operating current.
After eliminating the cause that caused the overload of the motor, in order to be able to start the motor again, we press the reset button of the thermal.












Relay selection according to engine power


Which motors can be connected with a Y/D star-delta switch
To connect a three-phase motor to the network, the pole voltage of the network must coincide with one of the operating voltages of the motor, which are indicated on its nameplate. The mains connection possibilities are given in the table below (the voltage that cannot be used is written in fine print)


Starting current
When starting three-phase motors, large starting currents occur. These currents cause a momentary dip in the voltage in the networks that supply the motors and which cause abnormalities in the proper operation of devices that need constant operating voltage.
These voltage drops depend not only on the starting current Iek, but also on the capacity of the power grid.
For three-phase motors in practice, the following values apply with a fairly good approximation:
Single-phase motor (direct start) Iek=6Ion
Three-phase motor (direct start) Iek=6Ion
Three-phase motor (start with Y/D) Iek=2Ion
Ring bearing engine Iec=1.25Ion
In general, in the A.T.K.v.d. their starting current or peak current (Iec) is a multiple of their nominal current (IN) depending on the motor's characterization in terms of the number of its poles and we consider that it follows the elements of the following table:

The limits of the maximum starting current demand defined by PPC in relation to the number of motor starts are related to the type of low voltage network (LV) that electrifies the installation, that is, if it is overhead or underground.
These limits are given in the table below:

In the event that the consumer has his own substation, then the limit of the permitted starting current defined by PPC depends on the apparent power (KVA) of the private substation.
These limits are given in the table below:

If none of the above is observed, we will have to limit the starting current by one of the ways being the automatic Y/D switch
Setting the switching time of the windings
The setting of the switching time of the windings needs special attention. As mentioned above, switching must be done when the engine approaches its operating speed.If it is done sooner, the fuses may be blown (because the motor has not reached its normal speed and the current will suddenly increase to a large value during the premature switching to delta) and after a few starts the delta relay contacts are destroyed.
If it is done late, we have a reduction in engine power and torque, which can also cause problems.
The switching time can be estimated empirically from the motor noise as it accelerates.
But it can be calculated more accurately by measuring the motor current.
The switching should be done when the starting current, as it decreases, falls to twice the rated current of the motor. This current can be measured with an ammeter and thus the switching time found.




Let's also look at some timers with double setting time
In these timings we set apart from the time when the switching from star to triangle will take place and another setting time in msec.When switching from star to delta it arms the delta relay and disarms the star relay at the same time. This puts stress on the motor and the relays because it creates a momentary short circuit and sparking when switching from star to delta In large motors I prefer to disarm the star relay first and then arm the delta relay after a few msec.

Special timing for starting star-delta motors
There are also some special timers to avoid the difficult wiring of the auxiliary circuit when using a simple timer. Also its use increases the life of the relay contacts and in case of failure of the timer, the motor does not start in star as it happens with the simple ones times.
Adjustable activation delay from 1-20 sec.
40-60 msec delay in triangle activation.
LED for operation indicator in a triangle.
It works continuously under voltage.
See 30 KW (40.7HP) motor starter with star-delta switch. The change from star to delta takes place in about 40 seconds as you can understand from the change in the motor noise in the following video
THERMAL SETTING
The thermal is set to 0.58 of the motor's rated current
But let's see below why
Let's say the rated current of a 3Φ 400Δ motor is 10A.
If the motor started directly in D it would draw 6*10=60A
When the motor starts in star Y the thermal will flow from 60/3=20A (IY=IΔ/3) for a few seconds until it reaches the rated speed.
When the motor turns in triangle D the thermal will flow from 10/2=5 A.
That's why I set the thermal to 0.58*10=5.8A
PROBLEM
We have a 10KW motor and cof=0.8
To find:
1 .The regulation of the thermal motor if it starts directly
2.The starting current of the motor if it starts directly
3.The regulation of the thermal motor if it starts with a Y/D switch
4.The current flowing through the thermal motor at the time of starting in star Y, if started with a Y/D switch
5. The current that flows through the thermal motor during the operation of the motor in delta D, if it starts with a Y/D switch
SOLUTION
The current of the motor will be
I=P/(1.73*V*conf)=10000 /(1.73*400*0.8)=18 A
Direct start
1. thermal setting at 18 A
2. motor starting current Iec=6*I=6*18=108 A
Start with Y/D switch
3. setting thermal at 0.58*I=0.58*18=10.44 A
4. The current flowing through the thermal motor at the moment of starting in star Y is Iek(Y)=Iek/3=108/3= 36 A
5. The current flowing through the motor thermal during the operation of the motor in triangle D is 0.5*I=0.5*18=9 A (I set the thermal to 10.44 A)
Manual star-delta switch
In addition to the automatic star-delta switch, in the past they also used the manual switch where the switching from star to delta is done manually, but straining the motor because the switching time is at the will of the operator


Books
https://elearning.teicm.gr/file.php/318/trifasikos_asynxronos_kinitiras.pdf
http://www.hlektrologia.weebly.com/uploads/6/7/1/5/6715419/p209_284.pdf
http:/ /ebooks.edu.gr/modules/ebook/show.php/DSGL-C123/487/3182,12850/
http://okeanis.lib.puas.gr/xmlui/bitstream/handle/ele13033.pdf
http:// www.mie.uth.gr/ekp_yliko/kinitires.pdf
http://www.hlektrologia.weebly.com/uploads/6/7/1/5/6715419/p209_284.pdf
http://www.mie.uth. gr/ekp_yliko/hlmhx_en6.pdf
Connections
https://www.matsakis.gr/syndesi_kinitirwn_astera_or_trigono_diafaneies.pdf
http://users.teilar.gr/~trogadas/MIXANES/ERGASTHRIO%20MIXANES%20AC/ergastirioAC.pdf
https://eclass.teiemt.gr/modules209. pdf
https://maredu.gunet.gr/modules/document/pdf
΄ http://edume.myds.me/00_0070_e_library/10030/06_Electrical_installations_books/12/B15.pdf
https://maredu.gunet.gr/modules/ document/pdf
Works
http://artemis.cslab.ece.ntua.gr:8080/jspui/bitstream/123456789/13594/1/DT2017-0252.pdf
http://repository.library.teimes.gr/xmlui/bitstream/pdf
http ://eclass.sch.gr/modules/document/file.php/T522110/askisi_3_automati_ekkinisi_trif_kin_vrax_dromea.pdf
http://nefeli.lib.teicrete.gr/browse/sefe/VardakisMichalis2014.pdf
http://users.sch.gr //iliaslamprou/images/stories/askiseis_electrikwn_egkatastasewn/syndesi_kinitirwn_astera_or_trigono/project_seet_automatos_diakoptis_astera_trigwnou.pdf
http://repository.library.teimes.gr/xmlui/bitstream/
Other
https://hlektrologia.weebly.com/uploads/6/7/1/ 5/6715419/p285_320.pdf
http://users.sch.gr/iliaslamprou/images/stories/askiseis_electrikwn_egkatastasewn/thema_6_monofasikoi_kinitires.pdf
https://elearning.teicm.gr/file.php/410/Single_phase_IM_SD_2017.pdf
http://okeanis.lib.puas. gr/xmlui/bitstream/handle/123456789
http://okeanis.lib.teipir.gr/xmlui/bitstream/handle/123456789/2863/ele_40956.pdf